Image Segmentation C++ Demo¶
This topic demonstrates how to run the Image Segmentation demo application, which does inference using semantic segmentation networks.
NOTE: This topic describes usage of C++ implementation of the Image Segmentation Demo. For the Python* implementation, refer to Image Segmentation Python\* Demo.
How It Works¶
On startup the demo application reads command line parameters and loads a model to OpenVINO™ Runtime plugin. The demo runs inference and shows results for each image captured from an input. Depending on number of inference requests processing simultaneously (-nireq parameter) the pipeline might minimize the time required to process each single image (for nireq 1) or maximizes utilization of the device and overall processing performance.
Note
By default, Open Model Zoo demos expect input with BGR channels order. If you trained your model to work with RGB order, you need to manually rearrange the default channels order in the demo application or reconvert your model using the Model Optimizer tool with the --reverse_input_channels argument specified. For more information about the argument, refer to When to Reverse Input Channels section of Embedding Preprocessing Computation.
Preparing to Run¶
For demo input image or video files, refer to the section Media Files Available for Demos in the Open Model Zoo Demos Overview. The list of models supported by the demo is in <omz_dir>/demos/segmentation_demo/cpp/models.lst file. This file can be used as a parameter for Model Downloader and Converter to download and, if necessary, convert models to OpenVINO IR format (*.xml + *.bin).
An example of using the Model Downloader:
omz_downloader --list models.lstAn example of using the Model Converter:
omz_converter --list models.lstSupported Models¶
deeplabv3
drn-d-38
erfnet
fastseg-large
fastseg-small
hrnet-v2-c1-segmentation
icnet-camvid-ava-0001
icnet-camvid-ava-sparse-30-0001
icnet-camvid-ava-sparse-60-0001
pspnet-pytorch
road-segmentation-adas-0001
semantic-segmentation-adas-0001
unet-camvid-onnx-0001
Note
Refer to the tables Intel’s Pre-Trained Models Device Support and Public Pre-Trained Models Device Support for the details on models inference support at different devices.
Note
The results can significantly differ depending on the model used for background segmentation and outdoors camera images segmentation.
Running¶
Running the demo with -h shows this help message:
segmentation_demo [OPTION]
Options:
-h Print a usage message.
-i Required. An input to process. The input must be a single image, a folder of images, video file or camera id.
-m "<path>" Required. Path to an .xml file with a trained model.
-o "<path>" Optional. Name of the output file(s) to save. Frames of odd width or height can be truncated. See https://github.com/opencv/opencv/pull/24086
-limit "<num>" Optional. Number of frames to store in output. If 0 is set, all frames are stored.
-d "<device>" Optional. Specify the target device to infer on (the list of available devices is shown below). Default value is CPU. Use "-d HETERO:<comma-separated_devices_list>" format to specify HETERO plugin. The demo will look for a suitable plugin for a specified device.
-labels "<path>" Optional. Path to a file with labels mapping.
-layout "<string>" Optional. Specify inputs layouts. Ex. NCHW or input0:NCHW,input1:NC in case of more than one input.
-r Optional. Output inference results as mask histogram.
-nireq "<integer>" Optional. Number of infer requests. If this option is omitted, number of infer requests is determined automatically.
-auto_resize Optional. Enables resizable input with support of ROI crop & auto resize.
-nthreads "<integer>" Optional. Number of threads.
-nstreams Optional. Number of streams to use for inference on the CPU or/and GPU in throughput mode (for HETERO and MULTI device cases use format <device1>:<nstreams1>,<device2>:<nstreams2> or just <nstreams>)
-loop Optional. Enable reading the input in a loop.
-no_show Optional. Don't show output.
-output_resolution Optional. Specify the maximum output window resolution in (width x height) format. Example: 1280x720. Input frame size used by default.
-u Optional. List of monitors to show initially.
-only_masks Optional. Display only masks. Could be switched by TAB key.You can use the following command to do inference on CPU on images captured by a camera using a pre-trained network:
./segmentation_demo -d CPU -i 0 -m <path_to_model>/semantic-segmentation-adas-0001.xml> NOTE : If you provide a single image as an input, the demo processes and renders it quickly, then exits. To continuously visualize inference results on the screen, apply the loop option, which enforces processing a single image in a loop.
You can save processed results to a Motion JPEG AVI file or separate JPEG or PNG files using the -o option:
To save processed results in an AVI file, specify the name of the output file with
aviextension, for example:-o output.avi.To save processed results as images, specify the template name of the output image file with
jpgorpngextension, for example:-o output_%03d.jpg. The actual file names are constructed from the template at runtime by replacing regular expression%03dwith the frame number, resulting in the following:output_000.jpg,output_001.jpg, and so on. To avoid disk space overrun in case of continuous input stream, like camera, you can limit the amount of data stored in the output file(s) with thelimitoption. The default value is 1000. To change it, you can apply the-limit Noption, whereNis the number of frames to store.
> NOTE : Windows* systems may not have the Motion JPEG codec installed by default. If this is the case, you can download OpenCV FFMPEG back end using the PowerShell script provided with the OpenVINO install package and located at <INSTALL_DIR>/opencv/ffmpeg-download.ps1. The script should be run with administrative privileges if OpenVINO is installed in a system protected folder (this is a typical case). Alternatively, you can save results as images.
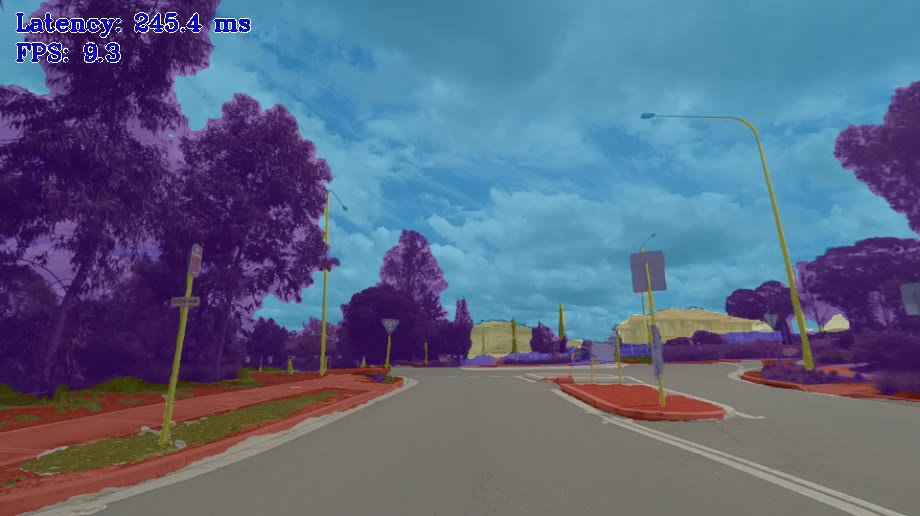
Demo Output¶
The demo uses OpenCV to display the resulting images with a blended segmentation mask. By setting -only_mask option (or pressing the TAB key during demo running) the resulting image would contain only masks. The demo reports:
FPS : average rate of video frame processing (frames per second).
Latency : average time required to process one frame (from reading the frame to displaying the results).
Latency for each of the following pipeline stages:
Decoding — capturing input data.
Preprocessing — data preparation for inference.
Inference — infering input data (images) and getting a result.
Postrocessing — preparation inference result for output.
Rendering — generating output image.
You can use these metrics to measure application-level performance.
Note
the output file contains the same image as displayed one.